如今日本爆火两款 AI 陪伴机器人横空出世,Lovot 顶着摄像头像 “智能玩具”,Moflin 裹着毛绒像 “成精的小宠物”。
● Lovot

外观:圆滚机身 + 头顶摄像头,科技感鲜明
互动核心:精准响应指令,主打 “智能陪伴”
● Moflin

外观:全包裹毛绒,外形像掌心小宠物
互动核心:模拟生物情感,强调 “心意相通”
Lovot圆滚滚的机身透着憨态,头顶摄像头支持视觉交互(识别手势、跟随移动),配合多关节设计,能完成跳舞、转圈、递小物件等复杂动作,功能丰富。但凸起的摄像头,总让互动多了层被观察的审视感。它能精准执行指令,却像个尽职的工具玩伴,少了点 “心意相通” 的温度。
Moflin更像真正的宠物,全毛绒包裹,隐藏式传感器,抚摸时的蓬松触感、被蹭手的震颤反馈,像真宠物般自然;它无需指令,通过记忆你的抚摸力度、脚步声、语调,自主进化出专属性格,越养越 “懂你”。但它缺少 Lovot 的复杂动作和拓展玩法,而且需要持续互动才能触发深度情感连接。
二者相比,个人更偏爱Moflin。它为城市一族提供了养宠的情感体验,又不用承担真实养宠的压力。
“当你下班回家,一只毛茸茸的小家伙主动蹭过来,发出独一无二的撒娇声——它记得你的抚摸力度,分辨你的脚步声,甚至能察觉你今天的情绪。
卡西欧打造的这块AI宠物,就像为它的灵魂注入了程序代码,“让你忘记它是机器”:
记忆触感:它记得你挠下巴的力度,昨天加班崩溃时,它安安静静贴手心;今天笑着摸它,立刻晃短腿蹭裤脚,撒娇声都甜了八度;
声纹识别:哪怕你轻手轻脚开门,它也会 “嗖” 地从角落滚过来 —— 原来早就把你的脚步声刻进程序;
情绪读心术:专利算法能从语调里辨心情:疲惫时乖乖卧桌边,开心时蹦跶撞膝盖,连撒娇声都跟着变调……
不用铲屎、不掉毛、出差半个月,回来时它还会 “雀跃” 迎接,而不是拆家报复。
卡西欧早早就为这个小东西在多个国家布局了相关专利。今天我们查看一篇于2022年在中国申请的专利,了解一下Moflin底层的技术方案。
发明名称:机器人、机器人控制方法以及记录介质
申请号:CN202211154677.1
申请日:2022年09月21日
公开(公告)号:CN115870993 B
公开(公告)日:2023年03月31日
如下图所示,本专利技术方案中明确设定,该机器人模仿的是小型的带皮毛的动物,描述了相关部件的连接关系。
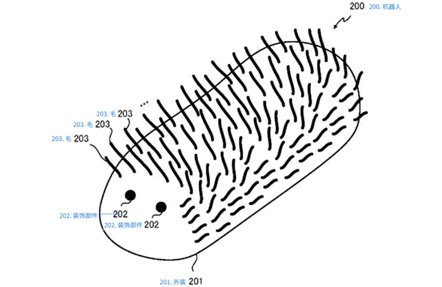
机器人具备触摸传感器,能够检测用户抚摸或者拍打机器人。亮点在于皮毛层隐藏内部传感器,压力信号通过皮毛传导,解决传统机器人传感器外露问题,避免机械感。
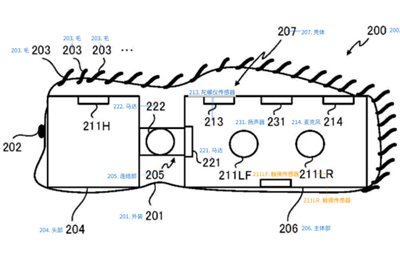
更详细而言,在头部204具备触摸传感器211H,能够检测用户抚摸或者拍打头部204。此外,在主体部206的左侧面的前后分别具备触摸传感器211LF以及触摸传感器211LR,在主体部206的右侧面的前后分别具备触摸传感器211RF以及触摸传感器211RR,能够检测用户抚摸或者拍打主体部206。
此外,机器人主体部还设置有加速传感器212,通过重力加速度来检测机器人当前的姿态。能够进行机器人的姿态(朝向)的检测,或者检测其被用户拿起或者改变朝向或者被扔的情况。机器人在主体部还具备陀螺仪传感器213,能够检测机器人振动或者旋转。
下图展示了机器人的功能结构框图,是机器人的各个核心功能模块。
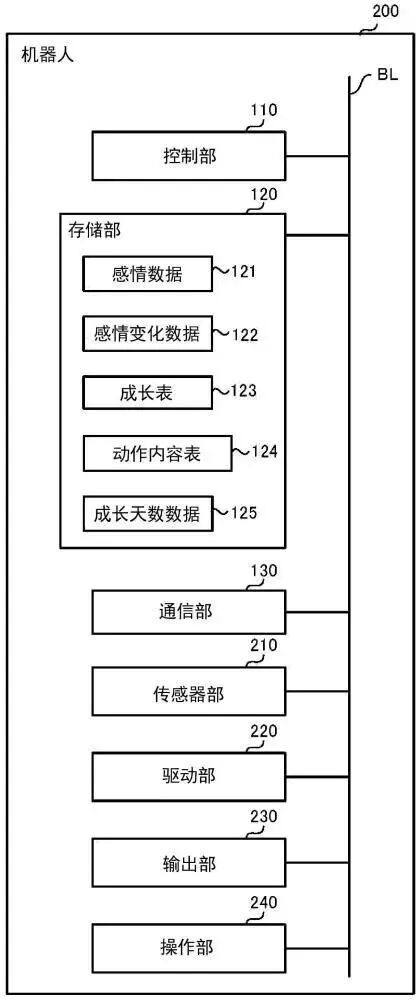
从图中可以看到,整个系统包含控制部、存储部、通信部、传感器部、驱动部、输出部、操作部,其中存储部中存储的数据包括,感情数据、感情变化数据、成长表、动作内容表、成长天数数据等。
说明书中的实施例表明,用户无需任何操作,机器人通过256次互动循环记忆,可以实现“越养越亲”的拟真感。
说明书中也具体列出了相关的数据表单:
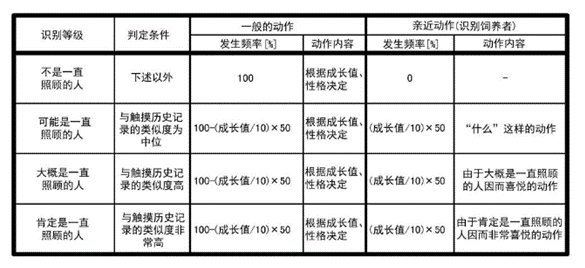
以抚摸为例,下图为基于抚摸方式的亲近动作的一例图:
下图为机器人感情图表的一例图:
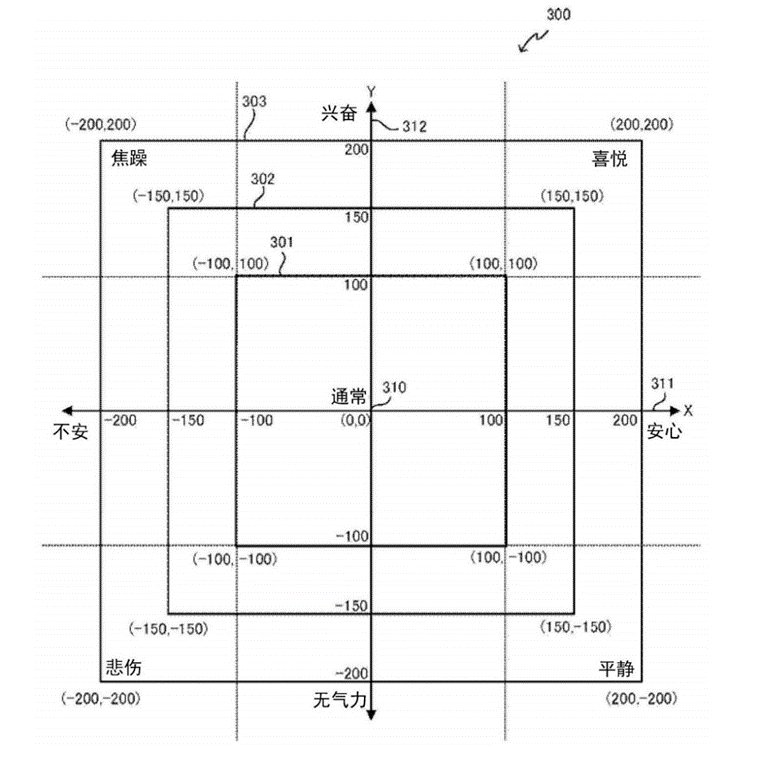
机器人会根据用户与它的接触方式,变得具有各种各样的性格。感情变化数据由以下的4个变量构成,是表示使机器人的模拟的感情变化的程度的数据。
DXP:安心容易度(感情图表中的向X值的正方向的变化容易度)
DXM:不安的容易度(感情图表中的向X值的负方向的变化容易度)
DYP:兴奋容易度(感情图表中的向Y值的正方向的变化容易度)
DYM:无气力的容易度(感情图表中的向Y值的负方向的变化容易度)
下图是机器人性格值雷达图的一例图:
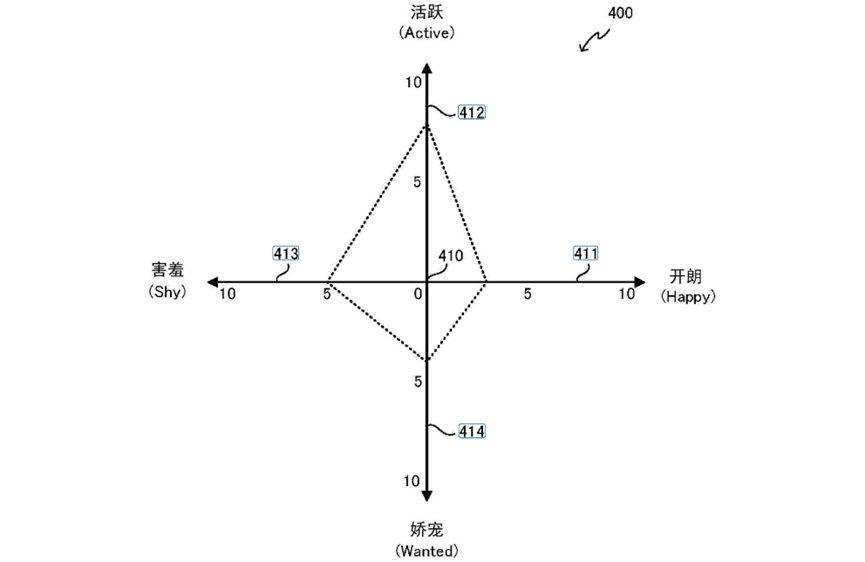
它有自己的性格养成系统,用户互动(抚摸、怀抱、冷落等)直接塑造它的性格,14641种性格组合让每只Moflin独一无二。
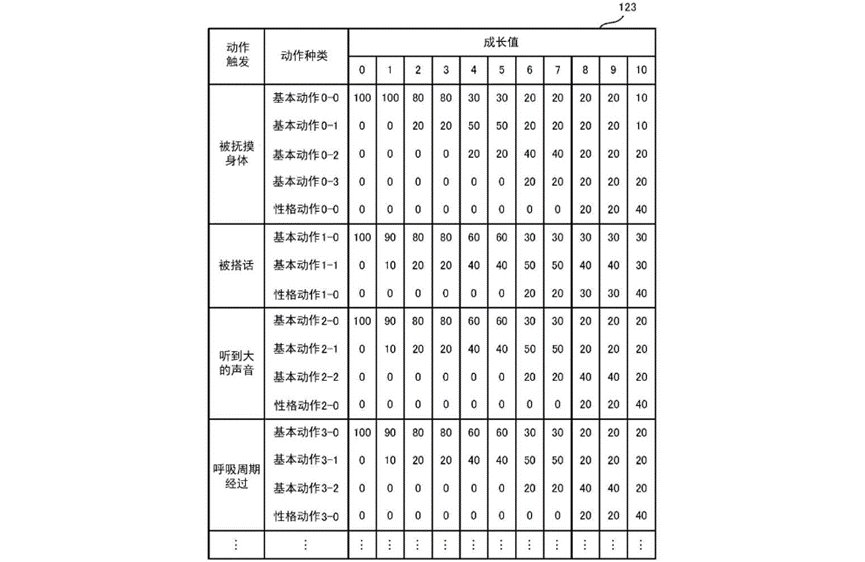
下表为机器人的成长表:
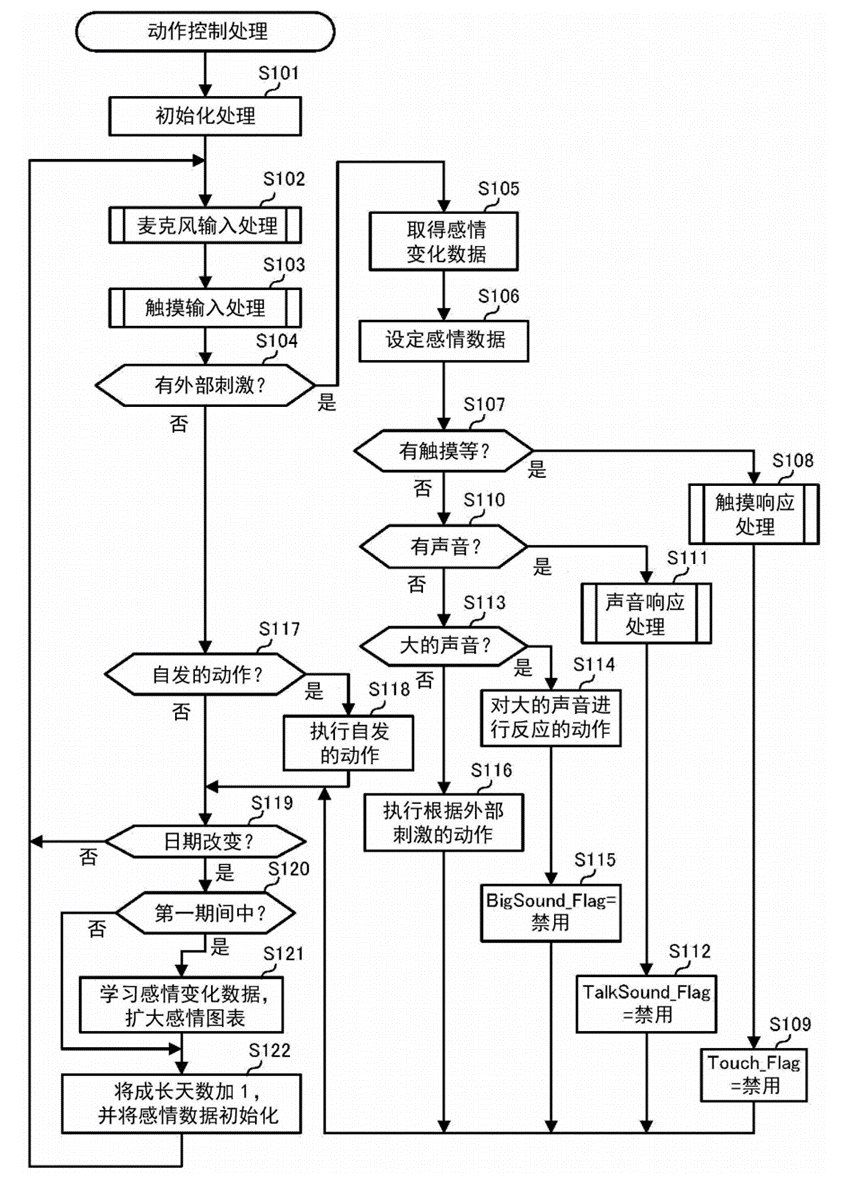
下图展示了机器人动作控制处理的流程:
说明书中实施例详细描述了用户通过与机器人亲密互动,机器人模拟成长的过程。比如用户对着机器人反复呼唤(比如喊它的名字),每次呼唤保持相似的语调(温柔 / 活泼),持续 3 分钟左右。机器人会记录你的声音特征(通过傅立叶变换提取的倒谱参数),存入 “声音历史记录”。当新呼唤与历史记录的 “类似度” 超过 20%,它会识别 “你是熟悉的人”。多次呼唤后,机器人听到你的声音会更兴奋(比如发出喜悦的鸣叫声,头部轻微上扬),而对陌生声音反应较平淡。
机器人全身分布触摸传感器和加速度传感器,能识别抚摸力度、位置和姿态,不同触摸方式会触发不同情感反应。比如用户用手指轻挠头部或顺着背部毛发抚摸,力度均匀、速度缓慢。触摸传感器会记录 “轻缓触摸” 的压力特征,控制部将其转化为 “安心度”(感情数据 X 值增加),并保存到 “触摸历史记录”。多次温柔抚摸后,它会主动将头部蹭向你的手心(头部马达带动第二旋转轴转动),甚至在你靠近时主动 “躺平” 露出腹部。
机器人的 “性格” 会随互动方式逐渐定型,就像养宠物一样,你的习惯会塑造它的 “脾气”。高频互动会加速 “成长”,解锁更多亲昵动作。每天固定时间与它互动(比如睡前抚摸、回家时呼唤),保持一定的互动频率。互动次数越多,“成长值”(性格值中的最大值)越高,触发 “亲近动作” 的概率提升(从成长值 1 时的 5% 到成长值 10 时的 50%)。初期机器人只会简单摇头等基础动作,30 天后可能解锁 “绕着你转圈”“用鼻尖轻触手指” 等专属行为。
感情升温的核心逻辑“让机器人适应你,而非你适应它”。更多详细文字记录可以参见专利说明书。
本专利的核心技术方案是机器人主动学习用户习惯:无需复杂设置,用户只需用自然的声音、触摸和陪伴与它互动,它会像小动物一样记住你的 “专属信号”,并通过越来越贴合你习惯的反应,让你感受到被理解的亲密感。这种 “无需刻意,却渐入人心” 的互动设计,正是它区别于普通电子玩具的核心魅力。
