一、行业背景
草坪维护为欧美家庭主要日常工作之一,除购买工具自主维护外仍有一定比例家庭选择雇人维护,割草是草坪维护领域价值量最大的场景。当前割草机市场仍以埋线式割草机为主,富士华、WORX占绝全球绝大部分份额(2023年富士华体量超80亿克朗)。但行业正逐步由埋线式/随机导航/随机碰撞式产品向无边界/规划导航/VSLAM避障产品升级(以九号公司、科沃斯、库犸科技、Sunseeker为代表),中国品牌线上亚马逊份额自2023H2以来快速提升。
图:当前割草机器人行业的产业链发展情况
割草机器人属于OPE行业,OPE行业(户外动力设备,Outdoor Power Equipment,OPE)指的是主要用于草坪、花园或庭院维护的工具或设备。除此之外OPE行业还包括扫雪机、吹雪机、链锯等品类,但割草机仍为核心品类。
二、库玛科技
今天我们要介绍的深圳库犸科技有限公司即是以上新型割草机器人领域的代表性公司,该公司成立于2016年,为松灵机器人旗下的子公司,是全球领先的智能庭院机器人企业,通过自主研发和融合先进的机器人技术,为海外庭院提供无边界割草机器人、泳池清洁机器人等革命性产品。
前文提到传统的埋线式割草机器人(需物理边界线)正被无边界方案取代,库犸科技当然在该技术上非常领先并且布局了大量路径规划、智能避障、定位修正等方面的专利,但是我们今天把目光调转一下,来看一件关于割草机器人驱动方式的专利申请。
三、专利解读
产品展示:
首先我们来看一下库玛科技的相关产品:

图:LUBA 2 AWD 系列
- 无边界,无烦恼:就像遥控车一样操控LUBA来设置虚拟边界。凭借我们的3D视觉和RTK融合测绘系统,可确保精确定位和边界遵守,无需任何布线。
- 多区域管理:可以设置多个割草区域,每个区域有不同的割草高度和时间表。LUBA会自动在这些区域之间来回移动。
- 禁止区域管理:设置禁止区域,不需要割草的区域,LUBA将严格避开这些指定区域。
根据其展示,该产品还具有全轮驱动系统,搭载四个强劲的轮毂电机,可以轻松应对38.6°的斜坡,并穿越最恶劣的地形而不会被卡住,其产品名中的「AWD」也来源于此。那么该系统是如何实现的,我们通过查看库玛科技申请的专利,可以得到一部分答案。
图:该产品的全轮驱动系统展示
四、专利信息
发明名称:割草机器人
申请号:CN202380010695.9
申请日:2023年03月30日
公开(公告)号:CN117082967B
公开(公告)日:2025年02月25日
- 技术方案:
现有割草机器人为后轮驱动,前轮为从动轮,转向依靠后轮驱动和前轮从动来进行原地转向,而采用该种驱动方式的割草机器人在转向过程中磨草严重,尤其是在转弯时靠内侧的前轮转动阻力大,容易出现打滑的情况,导致后轮磨草严重。基于此,本割草机器人包括机架、第一轮组和第二轮组,所述第一轮组和所述第二轮组分别设置在所述机架相对的前后两端上,其中,所述第一轮组为驱动轮,所述第二轮组为全向轮,所述割草机器人还包括控制器、第一驱动模组和第二驱动模组,所述控制器分别与所述第一驱动模组和所述第二驱动模组连接,所述控制器控制所述第一驱动模组驱动所述第一轮组运动而为所述割草机器人提供主要动力,所述控制器还控制所述第二驱动模组驱动所述第二轮组转动而提供辅助动力以克服所述第二轮组相对地面转动时所需克服的与地面之间的阻力。
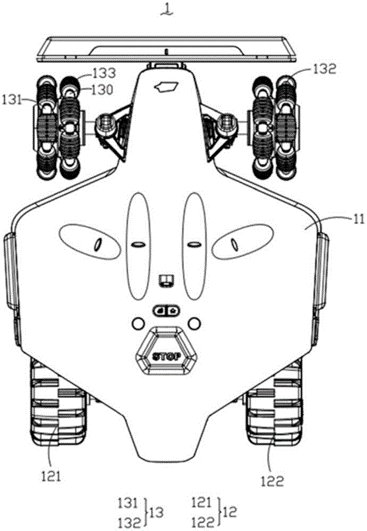
图:CN117082967B 附图
- 实施例:
以上技术方案中所述全向轮为具有至少两个自由度的轮胎,相比于常规的只有一个自由度的橡胶轮胎,全向轮增加的自由度位于轮胎胎面,即可通过与地面接触产生转动,且转动面与常规的只有一个自由度的橡胶轮胎转动面呈一定夹角;其可以是但不限于连续切换轮或者麦克纳姆轮。请参考图1,本实施例中,所述全向轮为连续切换轮,其包括轮毂130以及若干辅助轮133,所述若干辅助轮133间隔地穿设在所述轮毂130上。当所述全向轮前行时,所述轮毂130绕所述全向轮的中心轴线旋转,所述轮毂130带动所述辅助轮133整体绕所述全向轮的中心轴线旋转。当所述全向轮转弯时,所述辅助轮133能够以所述轮毂130为转轴相对所述轮毂130旋转。因此,所述全向轮相对所述驱动轮增加了自由度。
本申请中,所述第一驱动模组15为所述割草机器人1提供主要动力,可以驱动所述割草机器人1前进、转弯或者后退等,所述第二驱动模组16驱动所述第二轮组13相对地面转动而提供辅助动力以克服所述第二轮组13相对地面转动时所需克服的与地面之间的阻力,会使得所述第二轮组13上的辅助轮133在转弯过程中从侧向滑动转变为侧向滚动时,可以大大减小所述第二轮组13上的辅助轮133与地面之间的摩擦力,并且,由于所述第二轮组13相对地面转动的过程中,在不同时刻是不同的辅助轮133与地面接触,可以避免不同时刻仍然是同一辅助轮133与地面接触,这样所述第二轮组13在旋转的过程中,还可以将卡在与地面接触的辅助轮133之间的草屑、泥土等杂质甩出,可以减少辅助轮133之间卡草屑或者泥土等杂质的问题,可以切换不同的辅助轮133与地面接触,避免某一个辅助轮133因为被杂质卡住转不动而被拖动的情况,进而减轻了磨草程度,所述第一驱动模组15则无需因为转弯或者原地转向而对所述第一轮组12加大力矩,只需按照正常行进时的力矩驱动所述第一轮组12运动即可,由于所述第一驱动模组15没有在转弯或者原地转向时加大力矩,因此,不会因为力矩的增大而加大对草坪的损害,可以极大程度的减轻对草坪的磨损。
- 技术效果:
通过采用驱动轮和全向轮的组合,有效减轻了割草机器人对草坪的磨损,避免了因力矩增大而导致的磨草问题,提高了转向的灵活性和稳定性。
五、结语
通过对库玛科技的产品和专利简单解析,可以看到通过对割草机器人驱动模式的改进,非常有效的降低了割草机器人本身对草坪的破坏,可以预见的是能够大大提升用户的割草使用体验。
随着无边界类智能割草机器人相对于传统埋线式割草机器人渗透率的快速提升,可预见的是无边界类技术如RTK+多传感器融合(代表企业九号公司(Navimow)、Mammotion(松灵机器人/库玛科技)、Sunseeker(白马科技))、视觉SLAM(代表企业科沃斯、广和通)、激光雷达SLAM(代表企业追觅、东成电动科技)中,无论采用哪一种,均能有效提升割草机器人的智能水平和使用便利性,但是同时也可以关注一些算法之外的割草机器人本身驱动结构、割草模块、充放电方式等方面的研发改进,通过软硬结合共同改善的创新模式提升用户的使用体验,可能会帮助企业在将来的竞争中建立更好的优势。
