在当今数字图像处理和计算机视觉技术飞速发展的背景下,越来越多的研究者倾向于使用摄像机作为全自主移动机器人的感知传感器。视觉技术作为机器人研究的核心之一,涵盖了导航定位、路径规划、避障以及多传感器融合等多个方面。视觉系统在机器人中的应用主要体现在“眼睛”上,包括单目、双目、多目以及RGB-D等技术。这些技术赋予了图像深度信息,使得机器人能够更准确地感知和理解三维世界。
奥比中光科技公开的“结构光投影模组、深度相机及制造结构光投影模组的方法”专利(CN107748475A申请号:201711080702.5),通过二维阵列的子光源和衍射光学元件生成高质量的斑点图案化光束,以提高深度图像的分辨率和精度。
发明名称:结构光投影模组、深度相机及制造结构光投影模组的方法
申请号:201711080702.5
申请日:2017年11月06日
公开(公告)号:CN107748475A
公开(公告)日:2018年03月02日
01 技术痛点
机器人视觉感知需要深度计算的准确性和鲁棒性
在3D成像和深度感知领域,基于现有的结构光投影技术中,通常使用单一光源或简单的多光源阵列来生成投影图案。这些技术方案往往存在以下不足:投影图案的均匀性和分辨率较低,导致生成的深度图像质量不佳。相邻像图案之间的关系较为单一,影响深度计算的准确性和鲁棒性。
02 技术手段
视觉感知需要多种光源和光学元件的配合生成
该专利涉及一种结构光投影模组、深度相机及其制造方法,通过二维阵列的子光源和衍射光学元件生成高质量的斑点图案化光束,结合多种像图案关系,显著提高了深度图像的分辨率和精度。
具体地,针对光源设计:采用二维阵列的多个子光源,可以生成复杂的二维图案化光束,提高投影图案的分辨率和均匀性。针对透镜汇聚:透镜将二维图案化光束汇聚,确保光束在经过衍射光学元件时具有较高的能量密度。针对衍射光学元件:衍射光学元件进一步处理汇聚后的光束,生成斑点图案化光束。斑点图案中的像图案之间具有多种关系(重叠、毗连、间隔),这有助于提高深度图像的精度和鲁棒性。
03 技术实施情况
二维阵列的多个子光源
1.创新点
通过布置成二维阵列的多个子光源,可以生成复杂的二维图案化光束,提高投影图案的分辨率和均匀性。
2. 优势
通过二维阵列的子光源和衍射光学元件,生成高质量的斑点图案,提高了深度图像的分辨率和均匀性。
3. 具体方案
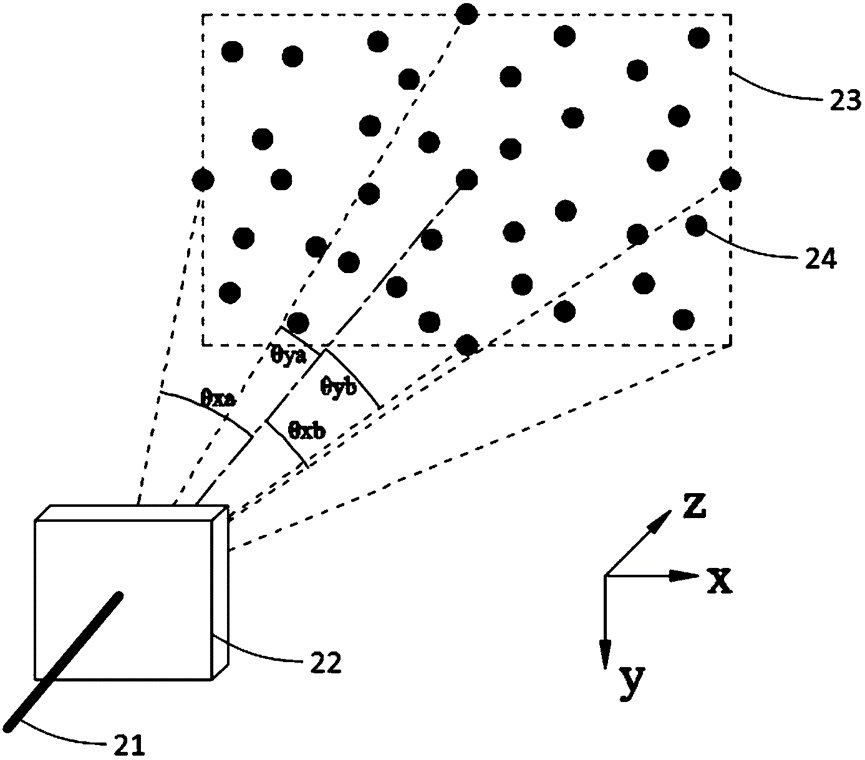
结构光投影模组包括由多个光源组成的阵列31、透镜32以及DOE33。为了以示便利,在图中仅在一维x方向上画出了3个子光源(从图中自下向上分别为子光源1,子光源2和子光源3),在实际的实施例中,光源数量可以达到几十甚至上万个,光源也可以以二维排列,排列形式可以为规则,也可以不规则,光源31阵列发射出的光束可以形成与光源排列对应的图案化光束,该图案化光束经透镜32汇聚后入射到DOE33上,由DOE33向空间中投射斑点图案化光束,图案化光束入射到距离为D的平面上将会投影出斑点图案。这里的汇聚指的是透镜将一定发散角的入射光束经汇聚后以更小发散角的出射光束进行出射。子光源31的间距为nx,子光源所在的区域大小为sx,若为二维排列,则间距可以用n(nx,ny)来表示,同样地,子光源所在区域大小为s(sx,sy),光源31与DOE33之间的距离为d,d近似等于透镜32的焦距。
透镜汇聚和衍射光学元件
1. 创新点
透镜将二维图案化光束汇聚,确保光束在经过衍射光学元件时具有较高的能量密度;衍射光学元件进一步处理汇聚后的光束,生成斑点图案化光束。斑点图案中的像图案之间具有多种关系(重叠、毗连、间隔),这有助于提高深度图像的精度和鲁棒性。
2. 优势:性能提升
更高的投影图案分辨率和均匀性,增强了深度图像的质量。功能增强:多种像图案关系提高了深度计算的准确性和鲁棒性。
3. 具体方案
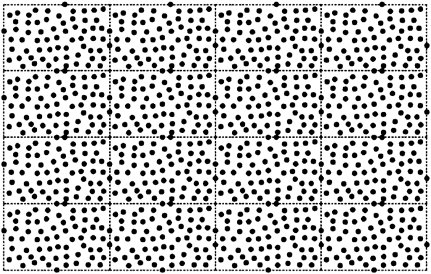
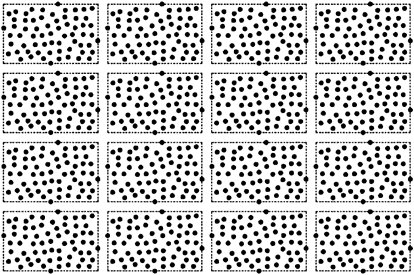
多个子光源对应的相同衍射级数的光斑共同组成的区域(361、362以及363,图中以矩形虚线表示)的大小、区域内斑点的间距均可以通过下式计算出:
Nx=nxD/d (4)
Sx=sxD/d (5)
式中,Sx、Nx分别表示相同级数光斑组成的区域大小以及区域中斑点的间距。通过以上公式可知,该区域大小以及区域内斑点间距与光源31的大小及子光源的间距之间的关系与透镜针孔成像模型一致,因此,可以将区域361、362以及363看成是光源31所成的像。即,最终投影出的衍射光束是由多个光源发射的图案化光束组合而成,换句话说,最终在平面34上形成的斑点图案,是由多个光源排列图案的像图案组合而成。像图案361、362以及363之间没有重叠。另外像图案之间可以有重叠,像图案461、462以及463之间有重叠。像图案之间是否重叠的取决要素之一是相邻级数的衍射斑点之间的间距Mx,这一距离则由DOE本身的性能决定。可以理解的是,像图案与光源排列图案之间既可以是中心对称的成像关系,也可以通过对透镜的设计实现其他方式的成像关系,比如相同(例如像图案之间构成复制品(replica)的关系)、镜像(例如像图案之间构成轴对称的镜像品(mirror)的关系)、旋转(例如像图案之间有一定的旋转角度,如30度、45度、60度或者其他合适的角度)等。
像图案的方形形状以及最终所形成的斑点图案的整体形状大体上是分别与x、y轴对齐(即方形的两条边分别与x、y轴平行),且结构光投影模组与采集模组的基线为x方向。在一些实施例中,为了进一步提高不相关度,可以将斑点图案的形状进行旋转,使得基线与斑点图案和/或像图案的任一边均不平行,即,使得斑点图案和/或像图案的原本与基线方向平行的边与基线之间产生了一定的夹角,由此可以进一步提升斑点图案沿基线方向上的不相关度,以提高深度计算精度。经验证,为了保证斑点图案要填充满整个采集模组的视场区域,夹角不宜过大,优选地,夹角为2至10度。可以理解的是,由于随机性,这里所说的斑点图案的边并非直边,可以将其理解成斑点图案中像图案排列的大致方向。
4.总结
该专利属于3D成像和深度感知技术领域,具体涉及结构光投影模组、深度相机及其制造方法。其核心技术包括使用二维阵列的多个子光源生成高质量的二维图案化光束,并通过透镜和衍射光学元件投射出斑点图案化光束,以提高深度图像的分辨率和精度。
04 发展趋势
1. 高分辨率和高均匀性
未来的结构光投影技术将更加注重提高投影图案的分辨率和均匀性,以满足更高精度的3D成像需求。
2. 多模式融合
结合多种成像模式(如结构光、ToF、双目视觉等),以提高系统的鲁棒性和适应性。
3. 智能化和自动化
利用人工智能和机器学习技术优化深度计算算法,提高处理速度和准确性。
4. 低成本和高效制造
开发更高效的制造工艺,降低生产成本,推动大规模应用。
5. 潜在创新方向
1)新型光源技术:探索新的光源技术,如微纳光源阵列,进一步提高光束的质量和控制精度。
2)自适应光学系统:引入自适应光学技术,动态调整透镜和衍射光学元件,以适应不同环境和目标表面特性。
3)集成化设计:将结构光投影模组与其他传感器(如RGB摄像头、红外传感器)集成,形成多功能一体化的深度相机。
05 结语
机器视觉技术作为机器人感知外部世界的重要手段之一,正在深刻改变着工业生产的面貌。通过自动化识别和检测,机器视觉系统为工业生产带来了高效率、高质量、高可靠性的生产体验。今后可以更多的应用于如自动驾驶、虚拟现实、医疗成像等领域,满足更多行业的需求。通过这些创新方向,可以进一步提升结构光投影模组和深度相机的性能,推动3D成像和深度感知技术的发展,满足更多高精度和高可靠性的应用需求。在未来,随着技术的不断进步和应用领域的不断拓展,机器视觉技术将在更多领域发挥重要作用,为人类社会的发展带来更多的创新和变革。
(正文部分技术原理图示及案例数据均来自奥比中光科技公开专利文件)
