四足机器人的“关节革命”正在进行,专利如何成为产业价值链的制高点?
在机器人领域,四足仿生技术被誉为“移动能力的终极挑战”。从波士顿动力Spot到宇树Unitree系列,谁能突破腿部动力系统的性能极限,谁就能抢占千亿级市场的先机。而从宇树科技在2017年公开的专利“一种电驱动四足机器人的腿部动力系统结构”(CN106904226A)不难看出,宇树科技以三大技术颠覆传统设计,重新定义了四足机器人的运动能力与商业价值。
发明名称:一种电驱动四足机器人的腿部动力系统结构
申请号:CN201710149070.7
申请日:2017年3月10日
公开(公告)号:CN106904226A
公开(公告)日:2017年6月30日
01 传统四足机器人的技术之痛
传统四足机器人长期受制于三大瓶颈,制约其规模化应用与场景拓展:
- 集成度低:关节电机与传动机构分散布局,导致体积臃肿、抗冲击性差;
- 维护成本高:外置连杆和复杂线缆易受撞击损坏,单次维修成本可达整机价格的30%;
- 能效失衡:高速运动时电机过热,低速负载时扭矩不足,难以适应多场景需求。
02 宇树专利的三大技术突围
(一)模块化“积木式”结构:维修成本直降50%
宇树创新性地将腿部拆分为四个独立模块,每个模块集成髋、膝、踝关节的独立电机与传动单元,并通过平行四边形连杆机构实现动力传递。单腿损坏时,工人可在10分钟内完成更换,维修成本降低50%;对比MIT猎豹机器人外置连杆易损设计,宇树Go系列在工业巡检场景中故障率下降80%。
(二)抗冲击“铠甲”系统:寿命延长3倍
专利中采用三级力传导路径:外部冲击通过防摔防护板→电机外壳→推力轴承分散至机身,保护核心部件(如行星减速器)免受损伤。实测数据显示:在10万次跌落测试中,宇树机器人关节寿命达3年以上,远超行业平均水平的1年。
(三)智能散热+可变转速比:能效提升40%
动态散热结构包括:大腿杆内置散热翅片+轴流风扇,冷空气从基座吸入,经中空腔体排出,使电机在45℃高温环境下仍可全功率运行;变速黑科技亮点在于:搭载非同心圆齿轮组,根据地形自动切换高转速(奔跑)或高扭矩(爬坡)模式,使电机始终处于高效工作区间,续航提升25%。
03 专利解读——CN106904226A
一种电驱动四足机器人的腿部动力系统结构
(一)技术背景
相比于轮式机器人,足式机器人地形适应能力更强,能够在复杂的地形环境下灵活运动,国内外各科研机构都在努力推进四足机器人的进程。目前,纯电机驱动动力系统因其噪声小、可靠性高、成本低等众多的优点而逐渐成为了中小型四足机器人的主流动力系统。
但受限于当前电机及减速器工艺与结构的限制,现有的四足机器人电驱动关节,尺寸较大,结构复杂,重量大,并难以承受较大的轴向冲击力而损坏。另一方面,目前很多足式机器人采用的腿部传动连杆直接裸露在外的传动机构,很容易受来自外部环境的碰撞而损坏。
如MIT研发的猎豹(Cheetah)四足机器人,其正摆髋关节和膝关节两个电机共轴线并列集成在一起,虽具有较高的关节集成度,但结构复杂,不能承受轴向冲击而只能使用外置的保护 架来保护电机与关节,其这种两个关节电机驱动单元集成在一起的结构,大大限制了大腿关节的运动空间而影响四足机器人的运动性能,并且裸露在外的腿部传动连杆,很容易被外部冲击损坏。
(二)技术手段
杭州宇树科技有限公司(申请号:201710149070.7)通过模块化设计、反平行四边形传动与抗摔防护技术,打造高灵活、强抗冲击的四足机器人腿部动力系统,重新定义机器人运动能力。
(三)技术的实施方式
杭州宇树科技有限公司(申请号:201710149070.7)通过模块化设计、反平行四边形传动与抗摔防护技术,打造高灵活、强抗冲击的四足机器人腿部动力系统,重新定义机器人运动能力。
实施例①:平行四边形连杆机构
如图1所示,四足机器人机械结构,包括机身1和四个独立的腿模块,四个独立的腿模块包括:第一腿模块2、第二腿模块3、第三腿模块4、第四腿模块5。四个独立的 腿模块对称布置在机身的两侧,每一个腿模块与机身通过旋转副连接固定。
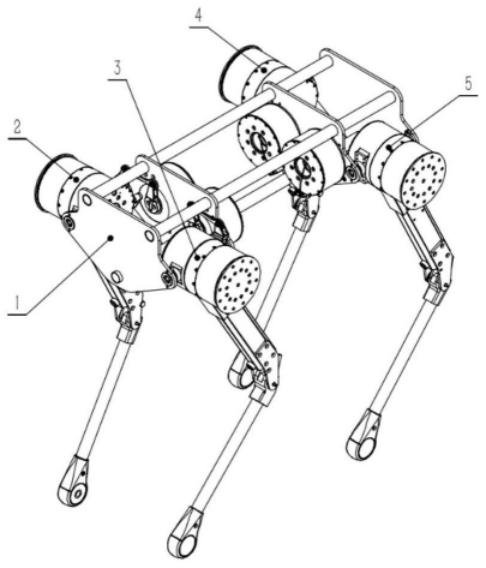
图1
如图2和图3所示,腿模块结构,包括大小腿总成3.1和侧摆髋关节电机总成3.5。侧摆髋关节主动曲柄3.2、侧摆髋关节连杆3.3、侧摆髋关节从动曲柄3.4与机身1共同构成了平行四边形连杆传动机构。侧摆髋关节从动曲柄3.4与大腿电机总成3.5固定连接,侧摆髋关节电机总成3.5固定在机身上,侧摆髋关节主动曲柄3.2固定到侧摆髋关节电机总成3.5的侧摆髋关节行星轮减速器3.5.4输出轴上,侧摆髋关节行星轮减速器3.5.4输 出轴带动侧摆髋关节主动曲柄3.2做旋转运动,并通过平行四边形机构将该运动传递给大小腿总成3.1。平行四边形机构传递扭矩大,传动间隙小,结构简单且稳定可靠。
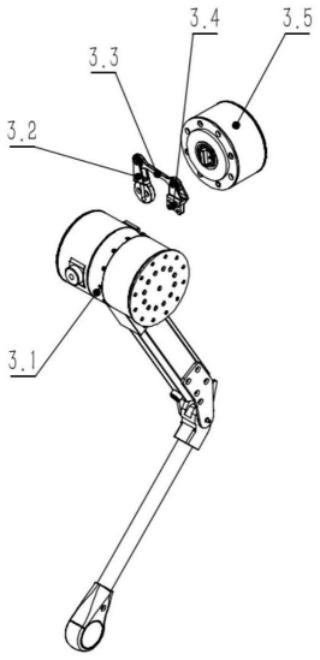
图2
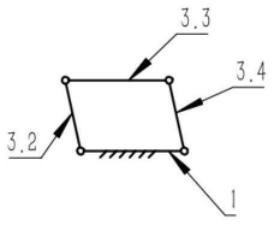
图3
实施例②:防摔结构
如图4和图5所示,大腿杆总成3.1.3与大腿电机行星轮减速器3.1.1.5输出轴固定连接,大腿电机行星轮减速器3.1.1.5输出轴带动大腿杆总成3.1.3做旋转运动,当四足机器人摔倒时,地面或障碍物对机器人腿部的冲击力通过电机防摔防护板3.1.5.1、小腿电机后端盖总成3.1.5.2、小腿电机外壳3.1.5.4、大腿基座3.1.3.3、推力轴承3.1.2、大腿电机外壳3.1.1.3、侧摆髋关节旋转销轴一3.1.1.4和侧摆髋关节旋转销轴二3.1.1.8传递到机身上,所述外部冲击直接通过上述强度较好的零部件传递,避免了大小腿电机总成内部转子、减 速器、轴承等脆弱结构受到冲击,提高了机器人腿部的抗冲击能力与可靠性。
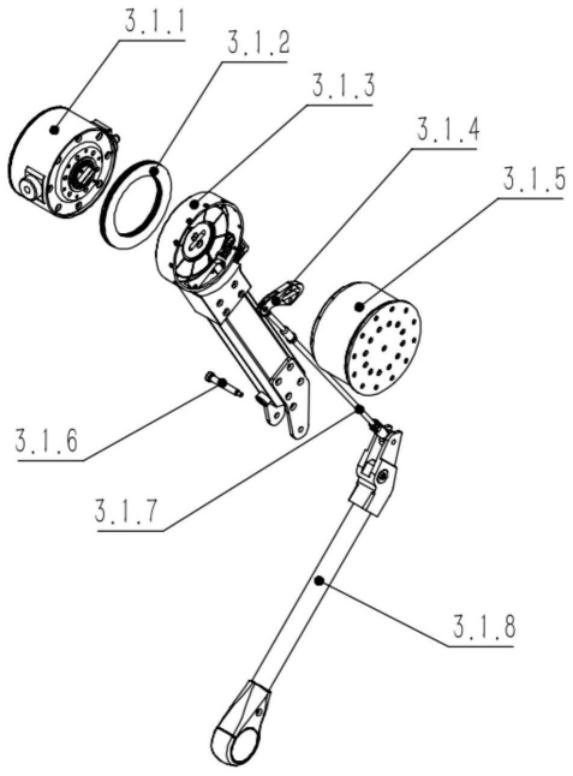
图4
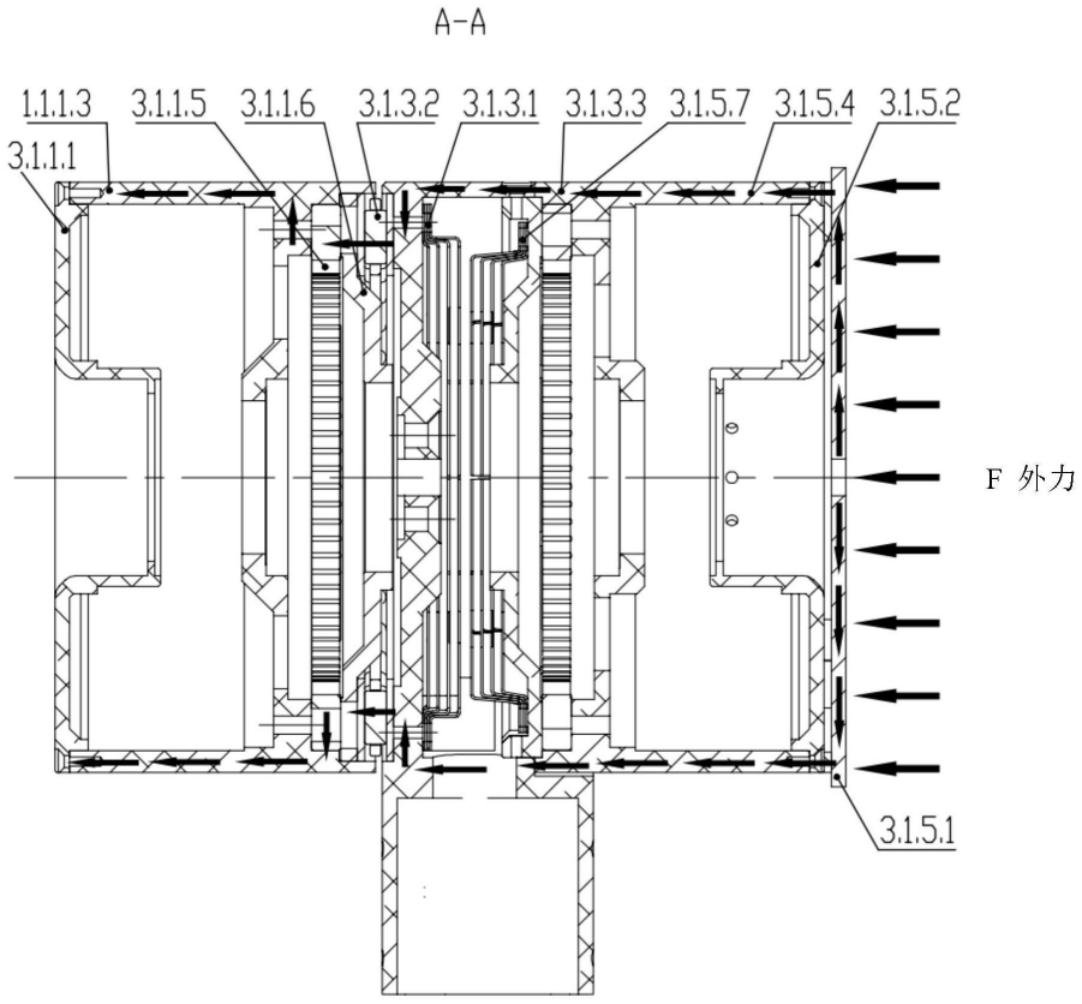
图5
实施例③:散热结构
如图6所示,小腿电机总成3.1.5包括电机防摔防护板3.1.5.1、小腿电机后端盖总成3.1.5.2、小腿永磁无刷电机3.1.5.3、小腿电机外壳3.1.5.4、小腿电机行星轮减速器3.1.5.5、小腿电机正端盖3.1.5.6和散热片一3.1.5.7。
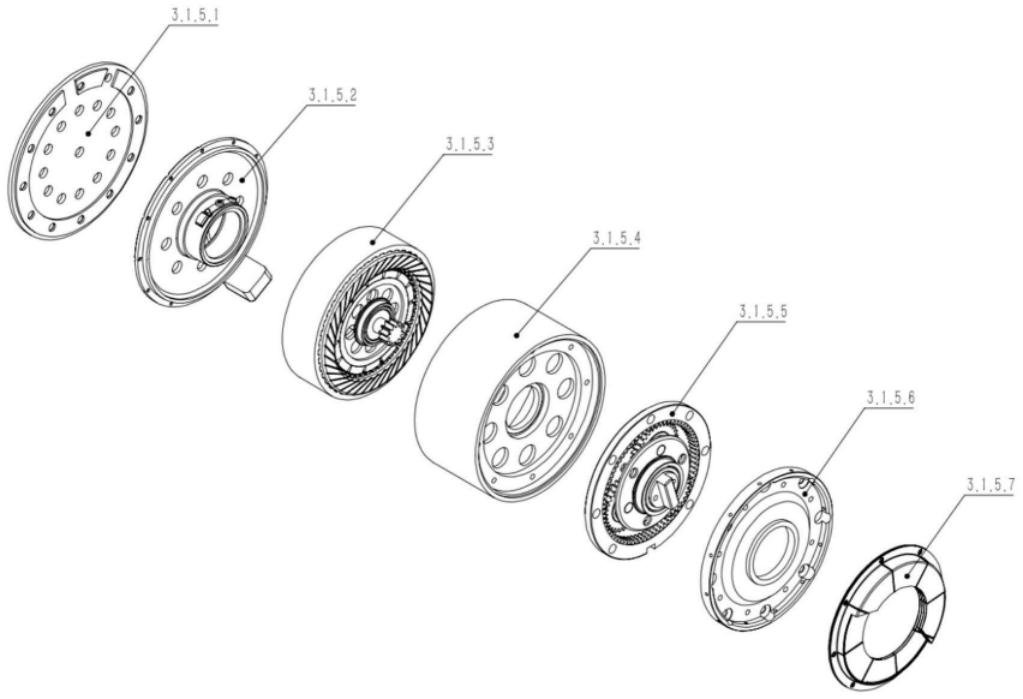
图6
04 从实验室到千亿市场:专利如何成为产业价值链制高点
凭借着模块化架构与自适应控制算法的深度融合,该专利技术在多元应用场景中展现出显著价值。
(一)工业场景:攻克极端环境运维瓶颈
以变电站巡检为例,对宇树机器人进行模块化设计后,其可在-20℃极寒环境中快速更换冻损关节,巡检效率提升3倍。
(二)应急救援:重构复杂地形机动范式
机器人可变身崎岖地形的“钢铁先锋”。结合可变转速比技术,机器人在废墟地形中自动切换“高扭矩模式”,单腿承重达50kg,可拖拽200kg障碍物,不惧艰险,使命必达。
(三)消费级市场:定义教育科研新标准
有数据表明,宇树Go1凭借高性价比(售价1.5万美元,仅为波士顿动力Spot的1/10),已进入全球50+高校实验室,成为机器人教育领域的“现象级产品”,使机器人完成了在消费级市场中的从“玩具”到“伙伴”的进化。
05 专利背后的“技术矩阵”:宇树的护城河战略
宇树科技的“一种电驱动四足机器人的腿部动力系统结构”的专利并非孤立存在,而是与宇树一百余项专利形成协同效应。
其中,形成功能联动的专利有:
CN119348737A(可变转速比):实现动力模式的智能切换;
CN118289111A(人形机器人腿部结构):打通四足向双足进化的技术路径;
CN109591045A(高集成关节):将电机、减速器、编码器浓缩至8cm直径空间,功率密度超传统设计40%。
06 下一代技术已蓄势待发
据宇树研发团队透露,下一代腿部系统将融合两大前沿方向:
- 液压-电机混合驱动:借鉴波士顿动力Atlas方案,爆发力提升300%;
- 神经形态芯片:通过类脑计算实时优化步态,响应延迟降至0.1毫秒级。
07 结语
宇树科技的实践揭示了智能硬件领域的底层逻辑:核心专利就是最硬的通货。无论是模块化设计带来的成本优势,还是可变转速比构建的技术壁垒,都在印证一个事实——中国机器人企业正从“跟随者”向“规则制定者”蜕变。核心专利不仅是技术主导权的核心载体,更是产业价值链的制高点,知识产权的“新基建”时代已经到来。
